理化所在仿生液态金属机电一体化器件研究方面取得进展
| 来源: 理化技术研究所 【字号:大 中 小】
感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制,在此基础上,还可以演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面向人工智能领域的功能集成系统的重要发展目标,也是未来柔性机电系统设计的重要方向。然而,目前的柔性机电智能系统的设计基本上是依赖于分布式功能单元的集成,系统的功能性集成是通过组装不同单一功能器件来实现的,不同单元之间的连接和协调不匹配问题十分突出。因此,如何在有限的系统空间内高度集成供能、传感、信号转化和信号处理等多种功能已经成为了人工智能系统开发所面临的重大挑战。
近日,中国科学院理化技术研究所刘静、饶伟团队从生物压电离子通道蛋白功能机制中获得灵感,设计了一种面向柔性人工智能领域的仿生液态金属机电一体化器件(LMMD)。在生物体内,机械刺激将引起压电离子通道蛋白的开关,从而触发细胞膜内外产生离子梯度;类似地,基于液态金属的机电耦合效应,机械刺激将引起液态金属液柱的双模态切换,从而触发电极间产生电荷梯度,形成自供能的输出状态切换行为(图1)。LMMD的机电性能遵循生物神经系统的响应机制,符合全或无定律,输出信号的信噪比可达40 dB(图2)。基于LMMD的输出状态切换行为特性,可以构建出不同的信号运算功能,其中包括信号逻辑运算、三进制线性运算(加、减法运算)(图3),以及信号模拟运算(信号放大和信号滤波)(图4)。另外,研究进一步证实了LMMD在智能识别、信息编码、通信和控制等方面的潜在应用价值(图5和图6)。这项工作将为推动新一代柔性人工智能系统的发展开辟新思路。相关成果以 Biomimetic Liquid Metal Mechatronic Devices为题发表在《先进功能材料》(Advanced Functional Materials)上。
在柔性电子领域,团队近期还针对液态金属微纳电路制造的普适性难题开展了流体动力学分析,从仿生学角度提出了差动毛细效应诱导的自组装方法。相关成果以Bio-Inspired Differential Capillary Migration of Aqueous Liquid Metal Ink for Rapid Fabrication of High-Precision Monolayer and Multilayer Circuits为题发表在《先进功能材料》(Advanced Functional Materials)上。
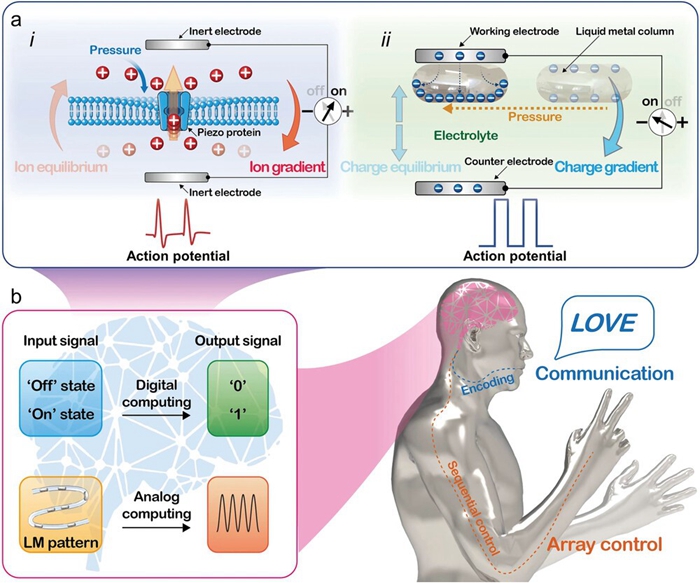
图1 LMMD的仿生设计。a. i)压电蛋白的压敏行为。ii) LMMDs的仿生的状态切换行为。b. LMMDs的集成功能及其在柔性人工智能系统中的应用。
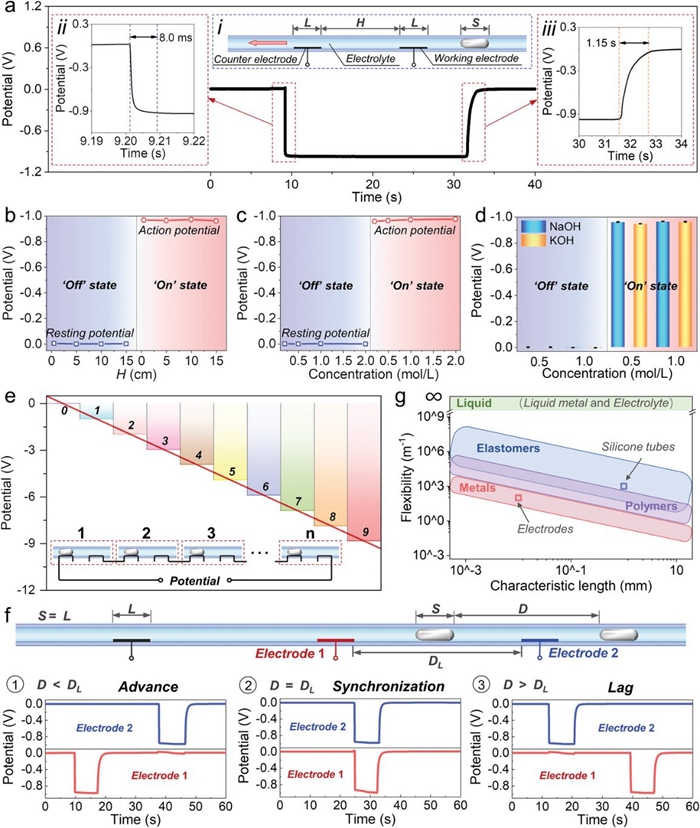
图2 LMMD的机电特性。a. LMMD的响应过程。i) LMMD的管道式拓扑结构。ii) 激活阶段;iii) 恢复阶段。b.液态金属液柱与电极间距的影响。c.溶液浓度的影响。d. 溶液种类的影响。e. 器件串联的输出响应。f. 输出信号的时序控制,包括信号超前、信号同步、信号滞后。g. LMMD的各组成部分的柔性评估。
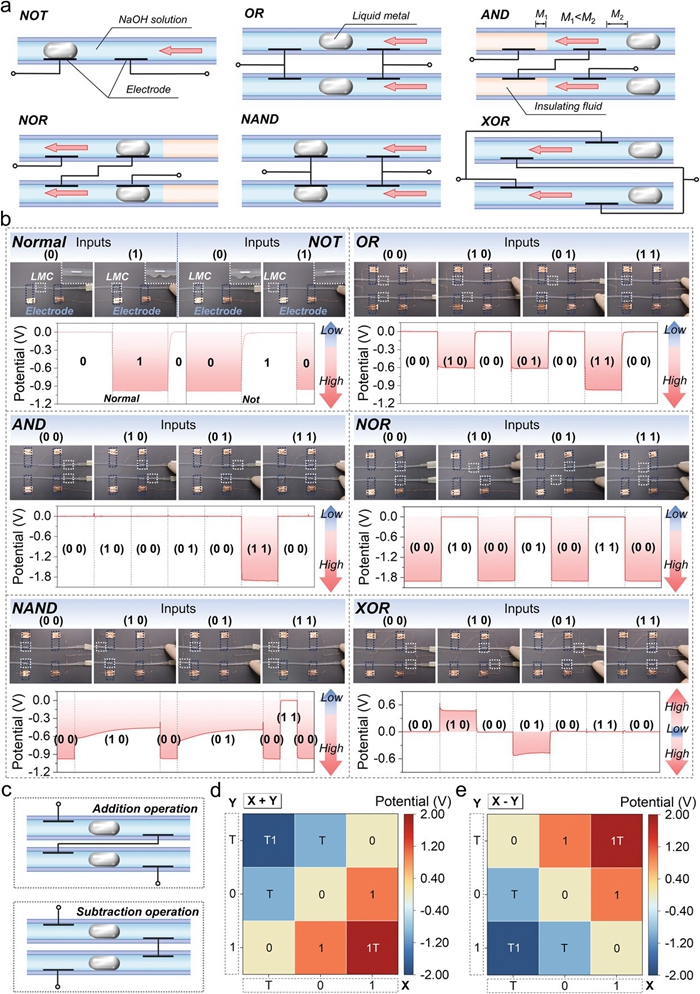
图3 LMMD的逻辑运算功能。a. 构建的逻辑门的结构原理图。b. 逻辑门的真值表和输出电位信号。c. 三进制加、减运算器的结构原理图。d. 加法运算的输出电位信号。e. 减法运算的输出电位信号。
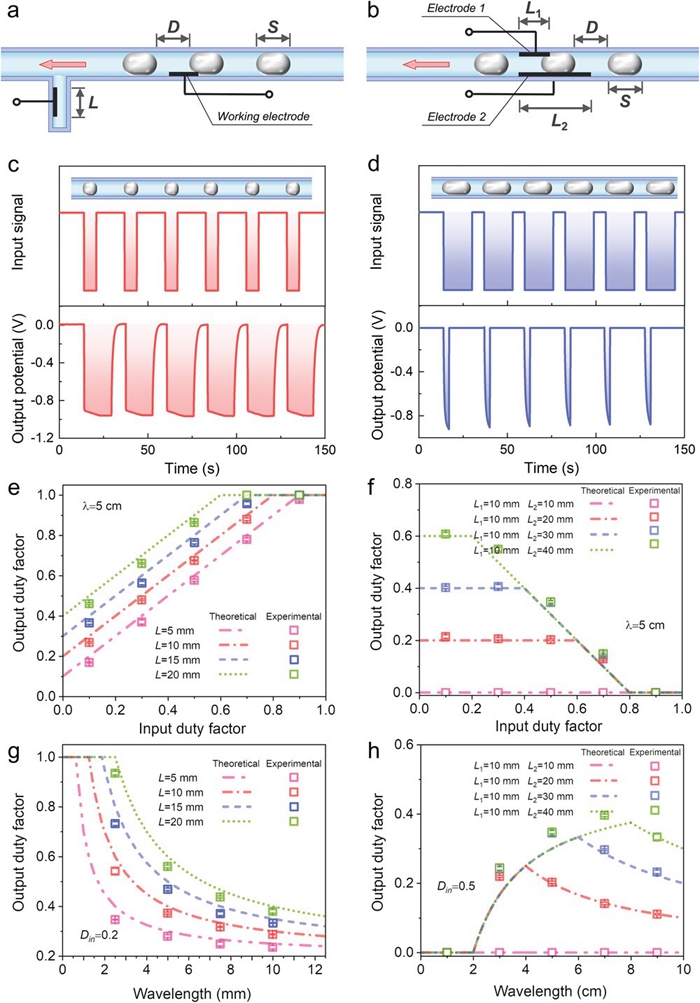
图4 LMMD的模拟运算功能。a. 第一种器件结构示意图。b. 第二种器件结构示意图。c. 信号放大。d. 信号滤波。e. 对于第一种器件结构,输入占空比与输出占空比的关系。f. 对于第二种器件结构,输入占空比与输出占空比的关系。g. 对于第一种器件结构,波长与输出占空比的关系。h. 对于第二种器件结构,波长与输出占空比的关系。
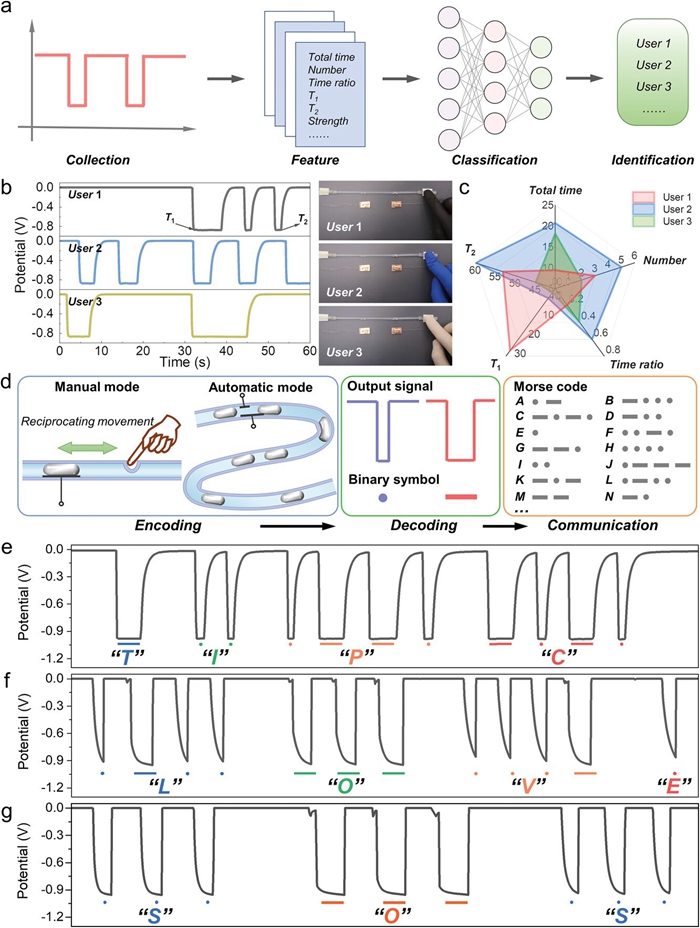
图5 LMMD的机电交互功能。a. 算法分析辅助的信息识别功能的原理示意图。b. 基于不同的按压习惯的输出信号。c. 输出信号特征的对比五星图。d. 信息通信和加密过程示意图。e. 在手动输入模式下,利用输出电位信号表示位置信息“TIPC”。f. 在自动输入模式下,利用输出电位信号表示情感信息“LOVE”。g. 在自动输入模式下,利用输出电位信号表示遇险求救信号“SOS”。
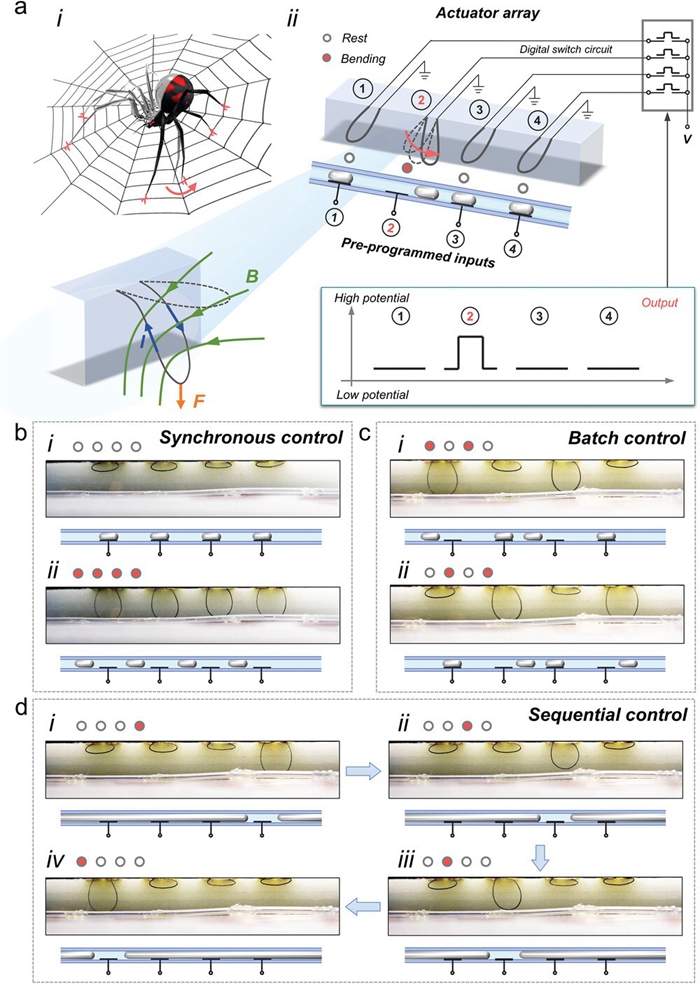
图6 LMMD的机电控制功能。a. i) 蜘蛛对脚的阵列控制。ii) LMMD的阵列控制原理示意图。b. 四个碳纤维致动器同步控制。c. 四个碳纤维致动器的批量控制。d) 四个碳纤维致动器顺序控制。

